Abstract
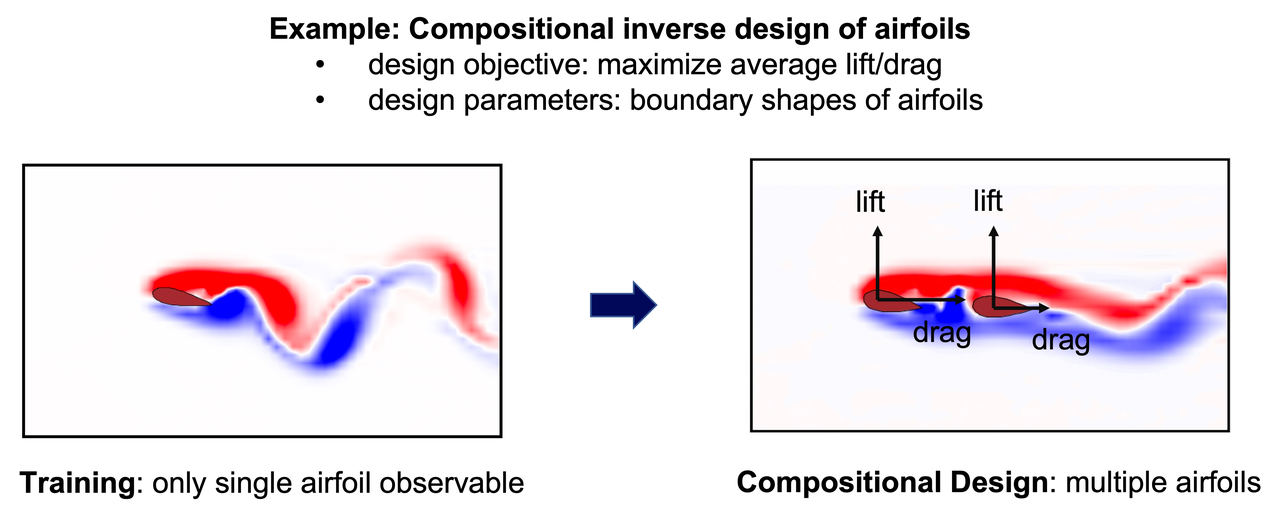
Inverse design, where we seek to design input variables in order to optimize an underlying objective function, is an important problem that arises across fields such as mechanical engineering to aerospace engineering. Inverse design is typically formulated as an optimization problem, with recent works leveraging optimization across learned dynamics models. However, as models are optimized they tend to fall into adversarial modes, preventing effective sampling. We illustrate that by instead optimizing over the learned energy function captured by the diffusion model, we can avoid such adversarial examples and significantly improve design performance. We further illustrate how such a design system is compositional, enabling us to combine multiple different diffusion models representing subcomponents of our desired system to design systems with every specified component. In an N-body interaction task and a challenging 2D multi-airfoil design task, we demonstrate that by composing the learned diffusion model at test time, our method allows us to design initial states and boundary shapes that are more complex than those in the training data. Our method outperforms state-of-the-art neural inverse design method by an average of 41.5% in prediction MAE and 14.3% in design objective for the N-body dataset and discovers formation flying to minimize drag in the multi-airfoil design task. Project website and code can be found at https://github.com/AI4Science-WestlakeU/cindm.
Compostional Inverse Design Task
Key Components
- Uses energy functions to implicitly govern dynamics and interactions among different components faithfully in the system
- Uses multiple diffusion model to learn the energy functions of composition
- Integrates the design objective effectively during inference, while ensuring physical consistency

Visualization Analysis
-
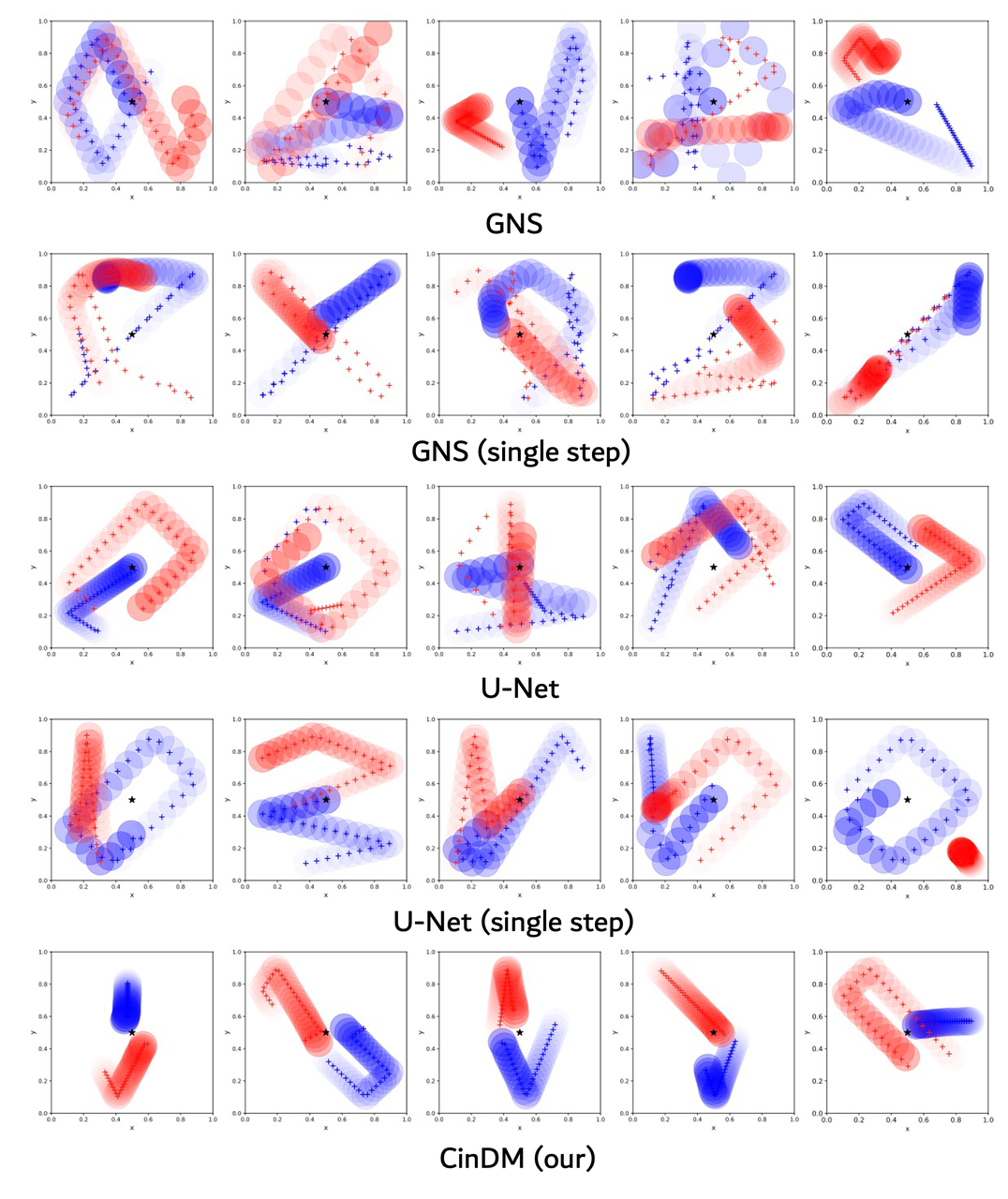
Composition inverse design across time on N-body task. Design results of four baselines are visualized together with CinDM (ours) for 54-step trajectories of 2 bodies. Training trajectories consist of 24-step trajectories of 2 bodies. The circles indicate the designed trajectory for the balls, drawn with every 2 steps and the darker color indicates later states. The central star indicates the design target that the end state should be as close to as possible. “+’’ indicates ground-truth trajectory simulated by the solver.
-
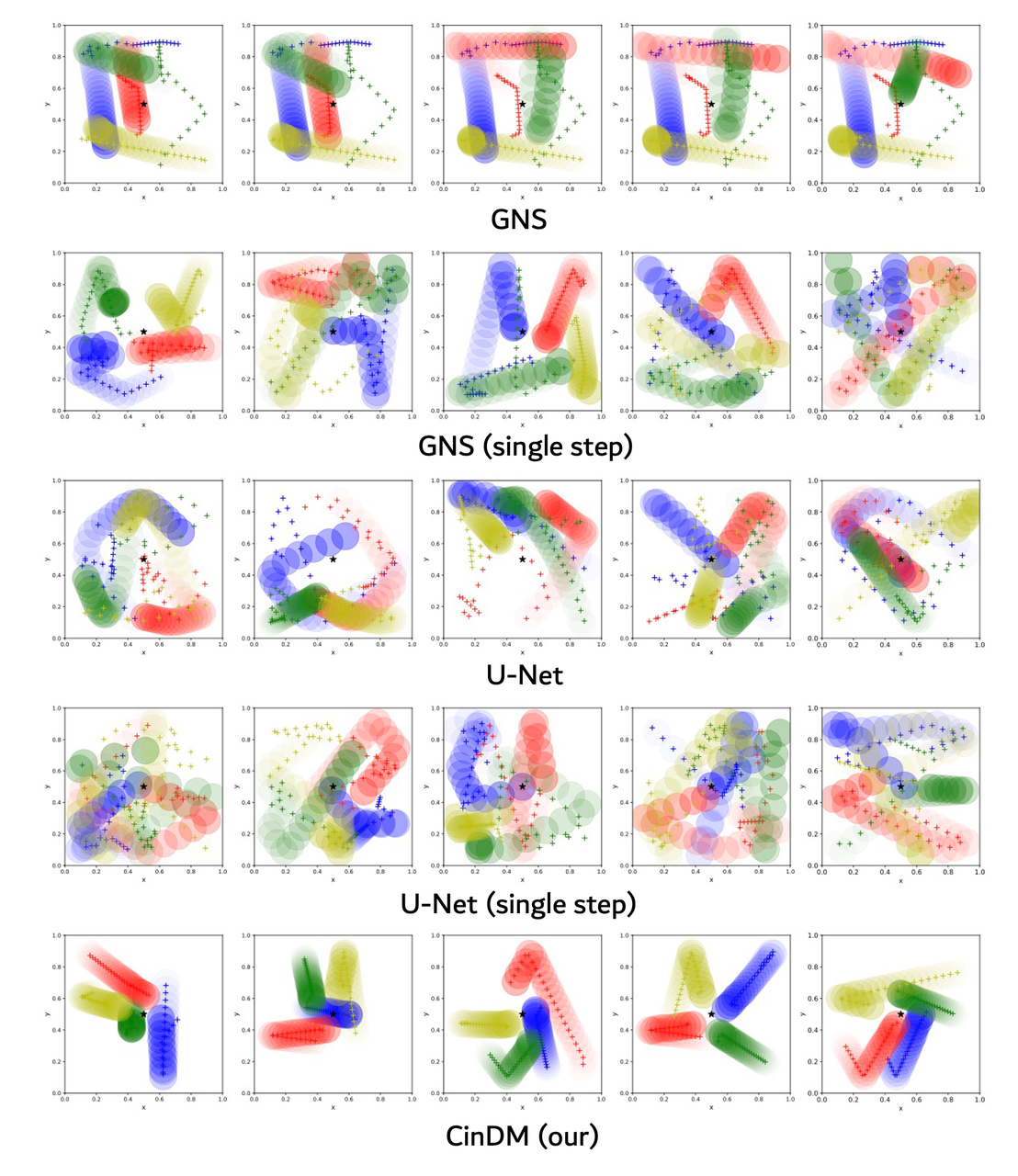
Composition inverse design across both time and objects on N-body task. Design results of four baselines are visualized together with CinDM (our) for 44-step trajectories of 4 bodies. Training trajectories consist of 24-step trajectories of 2 bodies.
-
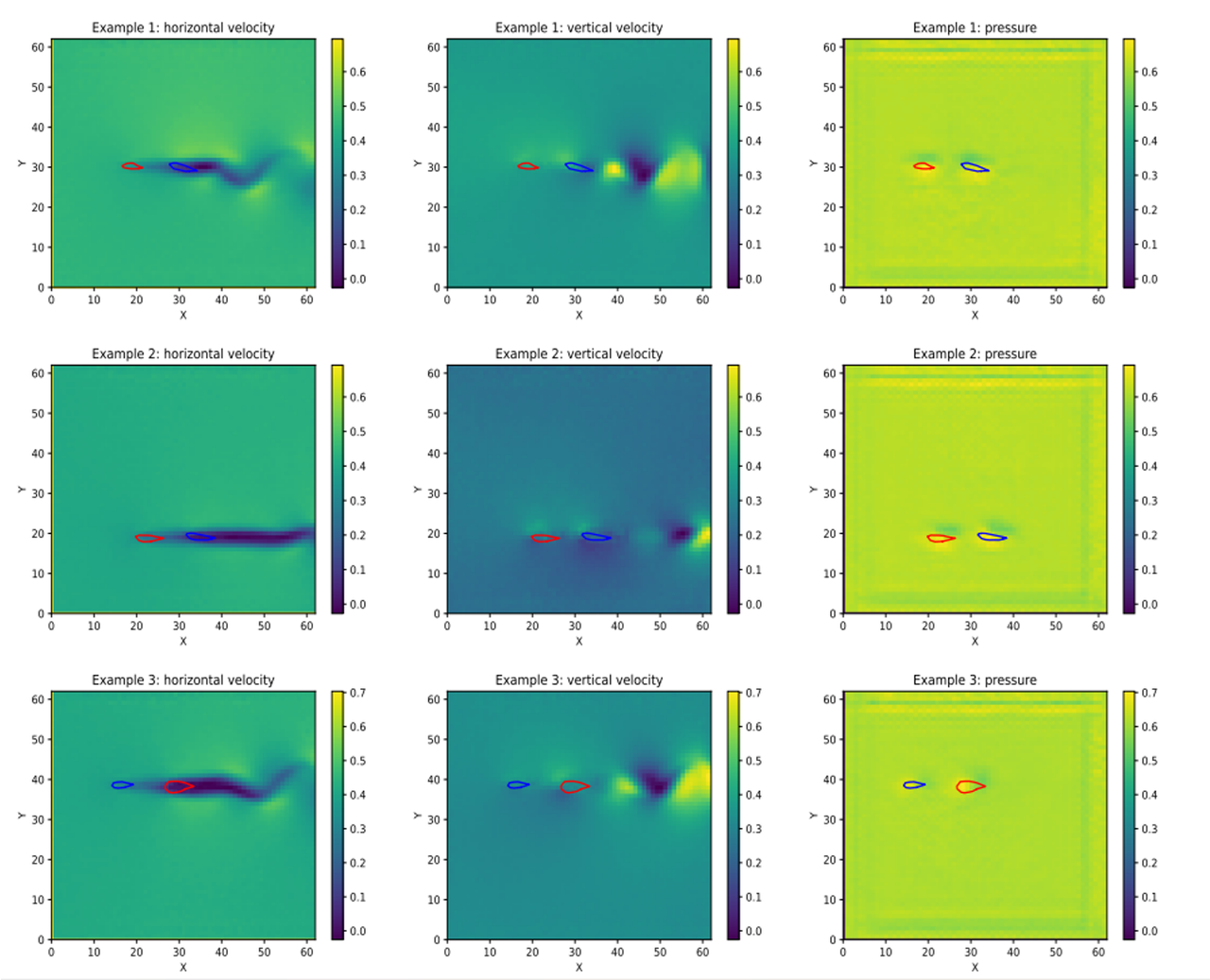
Compositional inverse design for two airfoils.
-
Design results of 3 examples by CinDM (our). Velocities and pressure of the initial time step and the generated boundaries of 2 airfoils are presented. Training trajectories consist of single airfoil.
-
Denoising process of 2 airfoils. The fluid horizontal velocity (in the left subfigure) and the corresponding boundary masks of airfoils (in the right subfigure) are simultaneously denoising over 1000 steps.
-
The generated boundaries of airfoils and fluid horizontal velocity (in the left subfigure) over 6 time steps and the corresponding boundary mask. These two airfoils are the same as those in the previous GIF figure.
-
-
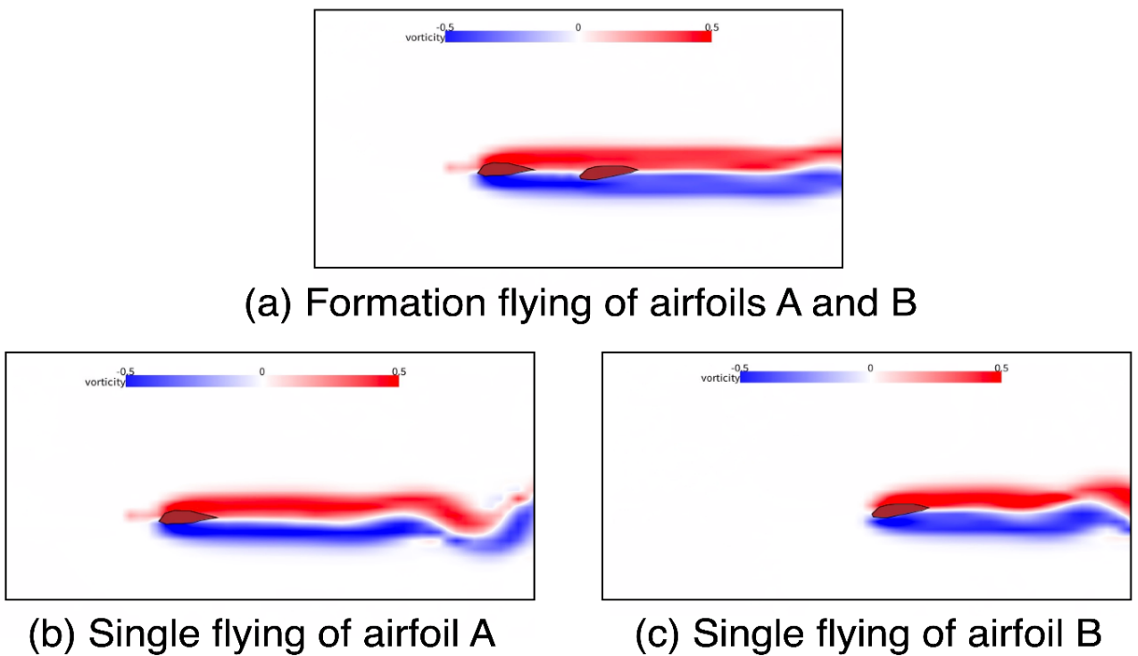
Discovered formation flying of two airfoils. Our model’s designed boundary forms a “leader’’ and “follower” formation (a), reducing the drag by 53.6% and increasing the lift-to-drag ratio by 66.1% compared to each airfoil flying separately (b)(c).
Take-away Message
CinDM enables:
- Optimization over the energy function captured by the diffusion model, thus avoid adversarial design examples and significantly improve design performance
- Design of a complex system with several subcomponents by composition of diffusion models representing these subcomponents. The composition achieves remarkable performance in generalization to more time steps, more interacting objects, and more parts of a system.
- Efficient design by training only one diffusion model and composing it flexibly during inference.
Acknowledgement
We thank Boai Sun and Haodong Feng for suggestions on Lily-Pad simulation. We thank anonymous reviewers for providing valuable feedback on our manuscript. We also gratefully acknowledge the support of Westlake University Research Center for Industries of the Future and Westlake University Center for High-performance Computing.
Citation
@inproceedings{
wu2024compositional,
title={Compositional Generative Inverse Design},
author={Tailin Wu and Takashi Maruyama and Long Wei and Tao Zhang and Yilun Du and Gianluca Iaccarino and Jure Leskovec},
booktitle={The Twelfth International Conference on Learning Representations},
year={2024},
url={https://openreview.net/forum?id=wmX0CqFSd7}
}